RTG視覺糾偏系統
CRH7004系列
 |
|
基于視覺系統產品擴展系列
|
|
基于視覺的防撞系統
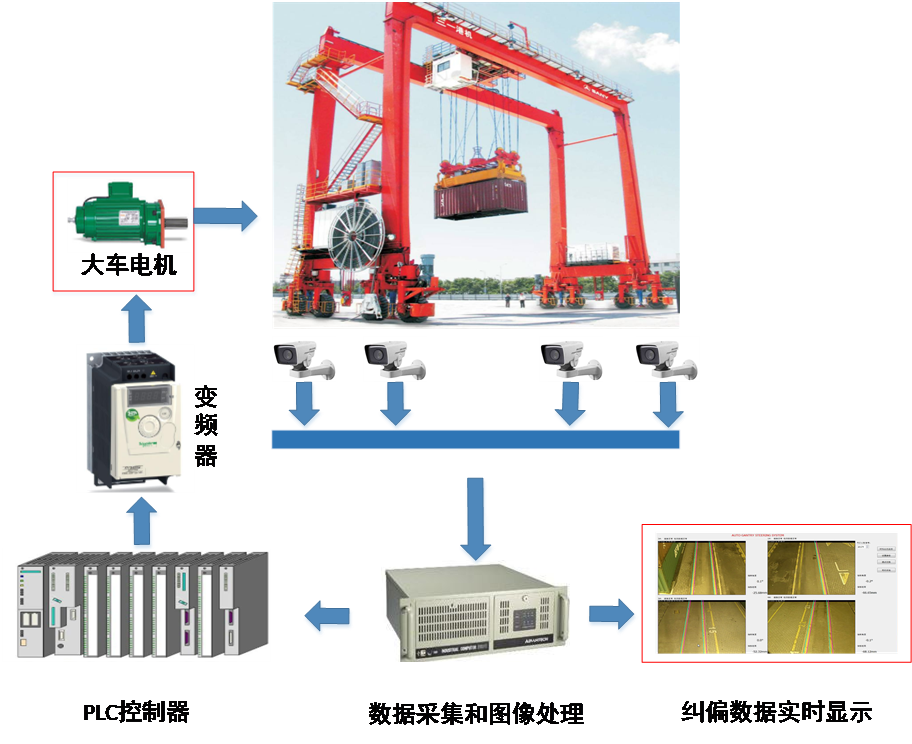
產品介紹 RTG自動糾偏系統由高精度相機、圖像采集與處理器、PLC 控制器、變頻器和大車電機等組成。RTG自動糾偏系統通過大車運行方向4個相機實時采集車道線圖像數據同時將圖像數據傳輸到工控機,工控機通過對圖像數據處理算法識別檢測出RTG方向偏差和位置偏差, 通過PLC完成偏差信息的接收和行車控制處理,通過變頻器控制大車左右電機的速度差達到自動糾偏功能。
產品特性 1)可實現RTG行走過程中障礙物智能識別與距離測量。 2)規避RTG在行走過程中碰撞危險。 3)可獨立或聯合RTG大車行走自動糾偏系統實現。
|
|
|
|
|
|
基于視覺的防集卡起吊系統
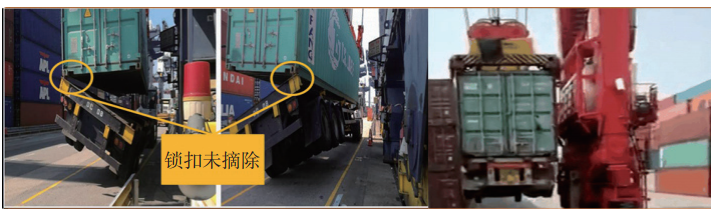
產品介紹 當集卡到達港口堆場進行卸車作業時需將集裝箱鎖頭解開,如果沒有解鎖或或者解鎖未完成,在集裝箱起吊時車身會被一并吊起,造成車輛損壞和危及集卡司機安全。 |
|
|
|
|
|
基于視覺的防砸車頭和集卡引導系統
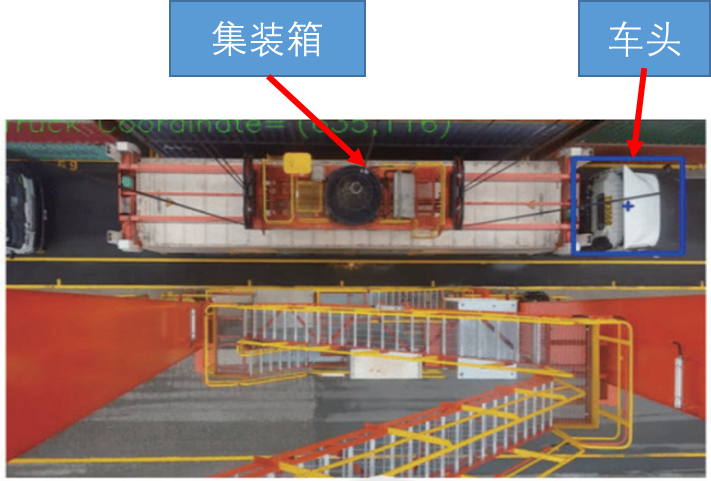
產品介紹 根據頂視相機感知車頭位置與集裝箱即將落放位置的相對位移量,一旦預測到可能發生意外,立即向龍門吊PLC電控系統發出指令;同時根據基于頂視攝像頭視覺對集卡本體進行識別以及停靠位置識別后進行集卡引導。 產品特性 對集卡本體進行識別以及停靠位置識別后可進行集卡引導。 |
|
|
|
|
|
基于視覺的抓放輔助定位系統
產品介紹 基于機器視覺的抓放輔助定位系統識別與跟蹤方式對集裝箱鎖孔、集卡車架鎖銷進行精確定位, 實現集裝箱對位抓放輔助功能。
產品特性 基于頂視攝像頭視覺對集卡本體進行識別以及停靠位置識別后進行集卡引導。 |
|
|
|
|
|
基于視覺鎖扣識別系統
產品介紹 該系統基于機器視覺技術,識別和檢測集裝箱底鎖是否摘除,并進行相應預警控制。
產品特性 1)識別與跟蹤方式對集裝箱鎖孔、集卡車架鎖銷進行精確定位。 2)實現集裝箱對位抓放輔助功能。 |
|
|
 |
|
|




- 關于澄瑞 公司概況 榮譽資質 大事記
- 新聞中心 新聞資訊
- 產品中心 港口岸電系列產品 港航節能及智能系列產品 儲能系列產品 船舶岸電受電系列產品 新能源船舶系列產品
- 解決方案 港口岸電系統解決方案 港航節能和智能系統解決方案 儲能系統解決方案 船舶岸電受電系統解決方案 新能源船舶系統解決方案
- 服務與支持 售后服務
- 加入我們 加入澄瑞